|
I work as a software engineer at Waymo on the Planner team, applying ML techniques to help the car reason about challenging multi-agent interactions in the next few seconds. I have a deep love for all human beings and I'm very interested in systems that model or interact with humans and make this world a better place for them. My research background is in applying ML to robotics, using imitation learning and other methods to make the training of robotic systems less taxing on the humans involved. I earned a Ph.D. from Princeton University as part of the Edge Lab, co-advised by Mung Chiang and Peter Ramadge. Prior to Princeton I did my bachelors and masters degrees in electrical engineering at Brigham Young University working with Karl Warnick and the MAGICC Lab on radar signal processing and design for drone collision avoidance. During my Ph.D. I also spent time training small robot cars with Sidd Srinivasa and the UW MuSHR team, and training large autonomous cars with the Motion Planning team at Aurora. I love running, cycling, triathlons, learning new languages, playing my cello, baking cookies, and puzzles. Resume / CV / Google Scholar / LinkedIn |

|
{kind=link}
|
|
 |
An overview of classical methods for learning from demonstration, including imitation learning and inverse reinforcement learning, followed with novel algorithms that improve on key deficiences in classical approaches. This includes lightly expanded versions of "Expert Intervention Learning" and "Feedback in Imitation Learning" papers below. |
|
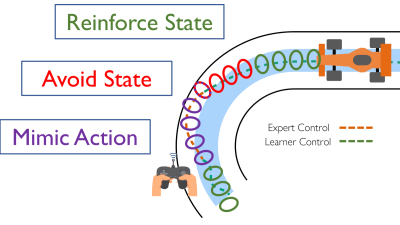
An expanded look at learning from interventions. This cost-based approach to imitation learning allows us to learn from a wide variety of feedback, including explicit actions and implicit signaling based on timing of takeover. We achieve 10x speedup over naive imitation learning. |
|
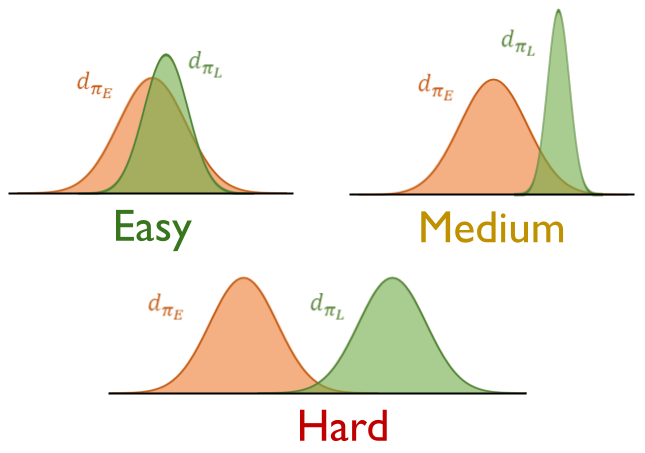
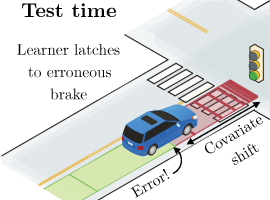
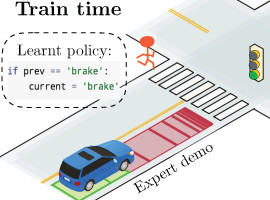
We show how imitation learning can be divided into three regimes of interest, depending on the amount of covariate shift induced by environment feedback effects. In the easy regime, naive behavioral cloning (BC) works out of the box. In the hard regime, we must query expert everywhere (i.e. DAgger). We introduce a set of techniques that require fewer samples than BC in the medium-difficulty "Goldilocks" regime. |
|
We introduce a new technique for imitation learning based on a supervisor that intervenes in the robot control. Based on both the timing of when the expert takes over and the content of what the expert does while in control, we achieve a massive speed-up over traditional imitation learning techniques. |

|
We introduce a point-process based technique for making timely and topical thread recommendations in MOOC discussion forums that significantly outperforms baselines. |
|
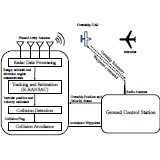
This work demonstrates a complete end-to-end collision avoidance system where the ego drone communicates in real time with a ground-based radar sensor that detects intruders and computes safe avoidance trajectories. This work was the cumulative effort of many years of work by many, many people. |

|
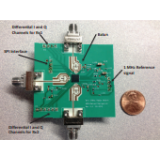
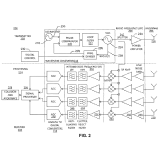
This thesis details the full-stack system design and signal processing of a four channel phased array FMCW radar system. The bulk of the supporting RF circuitry for LO, FMCW modulator, demodulation, and baseband filtering was done by myself, as well as the algorithms for processing and filtering the angular signal on the integrated DSP board. |
|
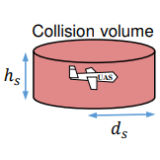
Based on realistic sensor models, maximum flight velocities of several different aircraft and a minimum safe distance of 500 ft, we determine that the minimum sensing distance for a UAV to be able to successfully detect, compute and execute a maneuver is 1.8km. |
|
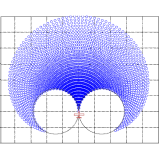
This work estimates probability of collision risk for a pair of aircraft at the same altitude using state estimates from a radar sensor and a reachable sets framework. |
|
This radar demonstrates the effectiveness of an ultra-low cost radar system (>$100) using a 24 GHz radar-on-a-chip system. |
|
|
 |
|
|
|
 |
|
|
|
|
|
|
|